最簡單IO驅動的智慧
從單片機到Arm7?、Arm9?、Cortex?-A8,從uC/OS到WinCE、Linux,GPIO驅動都是最簡單、最易編寫的驅動。但看似簡單、毫無技術含量的驅動,其是否完整?是否規范?是否安全?
本節將選取WinCE下兩例典型案例,從反、正兩個角度進行對比。
以WinCE下某一開源的GPIO驅動為例,截取IOControl部分的代碼,如程序清單1所示;請留意代碼突出顯示部分。
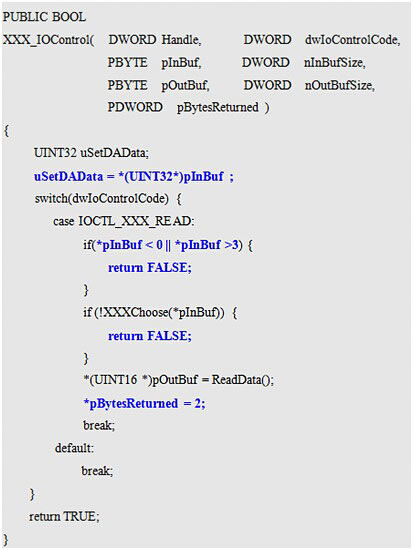
從反方案例,實現GPIO電平狀態的讀或寫的功能僅需要幾行代碼,非常簡單。
如程序清單2所示,代碼截取自ZLG某核心板GPIO驅動,請留意代碼中突出顯示部分。
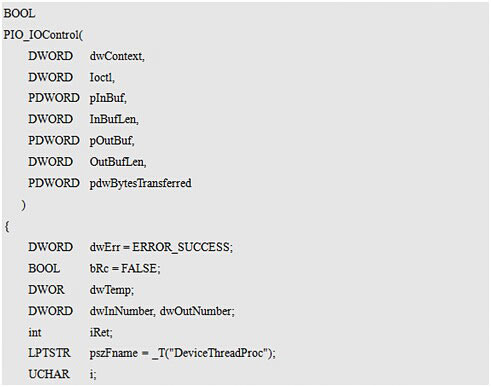
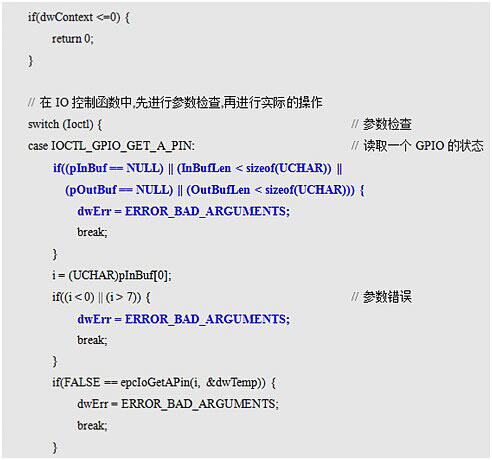
從正方案例,實現GPIO電平狀態的讀或寫的功能卻花費了2倍的代碼工作量,差異為何如此大?
在反方案例中,函數傳遞進來的指針參數未經判斷而直接使用,這種情況下若為空指針或野指針,則程序極可能出現異常甚至崩潰!
在反方案例中,函數傳遞進來的指針參數未經判斷而直接使用,這種情況下若為空指針或野指針,則程序極可能出現異常甚至崩潰!
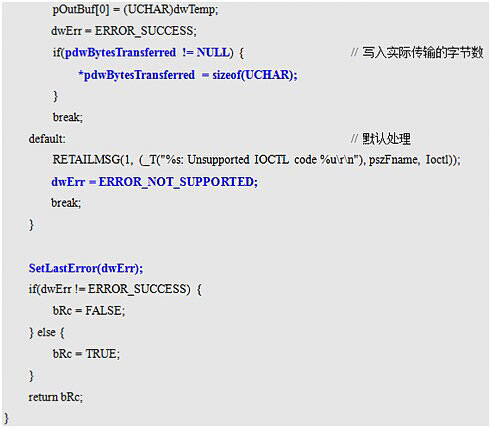
反方案例在讀取操作后,使用“*pBytesReturned = 2;”返回實際讀取的字節數,但是,該指針依然未經判斷而直接使用!
而正反案例則在每一項參數使用前均對參數范圍、有效性進行判斷,從根本上避免了參數異常情況的發生!
在反方案例中,XXX_IOControl只是返回TRUE或FALSE,返回FALSE時應用層無從獲取或獲知是什么原因造成了“FALSE”!
對比正方案例,在參數判斷時即開始添加錯誤提示,在return之前,調用SetLastError函數,應用層則可以通過GetLastError獲取錯誤原因,允許用戶更快速、準確的定位錯誤點。
反方案例函數體內外幾乎無注釋;
而正方案例,無論函數體內的關鍵位置還是函數體外,均做必要、詳細的注釋說明,為程序的后期維護帶來極大的便利!
包括最簡單的GPIO在內,驅動實現功能非常容易,但驅動的完整性與可靠性卻蘊藏著軟件工程的大智慧。

